A Comprehensive Report from the 2025 Humanoids Summit

A detailed analysis of the technical breakthroughs, commercial strategies, and policy discussions shaping the future of humanoid robotics
Executive Summary
The 2025 Humanoids Summit, held December 11-12 at the Computer History Museum in Silicon Valley, marked a pivotal moment in the evolution of humanoid robotics. This gathering brought together the world's leading robotics companies, AI researchers, investors, policymakers, and industry pioneers to explore the rapidly accelerating progress in embodied AI. What emerged from two days of intensive presentations, panels, and demonstrations was a clear picture: humanoid robots are transitioning from research curiosities to commercially viable platforms that will fundamentally reshape industries and society.
Part I: The Foundation Model Revolution in Robotics
The Paradigm Shift: From Programmed Tasks to Learned Intelligence
The most significant theme emerging from the summit was the transformative impact of foundation models on robotics. The traditional approach to robotics—programming specific behaviors for specific tasks in specific environments—is giving way to a new paradigm where robots learn from vast datasets and can generalize to novel situations. This shift is being driven by the same technologies that have revolutionized natural language processing and computer vision: large-scale transformer models trained on massive amounts of data.
Google DeepMind's Gemini Robotics: A Case Study in Embodied AI
One of the most comprehensive presentations on foundation models for robotics came from Google DeepMind, which detailed its Gemini Robotics platform. The evolution of this system illustrates the rapid pace of progress in the field. The journey began with the introduction of Large Language Models (LLMs) for robotics, enabling robots to understand natural language commands. This was followed by the integration of transformers and the development of Visual Language Action Models (VLAs), which allow robots to understand not just language but also visual context and translate that understanding into physical actions.

The Gemini Robotics series represents the culmination of these efforts. The initial release in March introduced a VLA capable of operating at 200-millisecond refresh rates, enabling near real-time robot control. The June release brought Gemini Robotics On-Device, which eliminated the need for constant network connectivity—a critical requirement for deployment in many industrial settings. The September update, Gemini Robotics 1.5, introduced what the company calls "embodied reasoning," a multi-agent system where a high-level planner orchestrates multiple specialized models to solve complex, multi-step tasks.
The architecture of Gemini Robotics 1.5 is particularly noteworthy. It consists of two primary components: Gemini Robotics ER (Embodied Reasoning), which serves as a high-level planner and orchestrator, and the VLA itself, which translates high-level plans into low-level motor commands. The ER model can access digital tools like internet search and maps, enabling robots to look up information they need to complete tasks. In one demonstration, a robot was asked to sort objects according to San Francisco's waste management guidelines. The robot autonomously looked up the guidelines online, examined the objects on the table, and correctly sorted them into compost, recycling, and trash bins.
Generalization: The Holy Grail of Robotics
The ability of these foundation models to generalize to novel objects and situations represents a fundamental breakthrough. In traditional robotics, encountering a new object or a slightly different environment often meant the robot would fail completely. Foundation models, by contrast, can leverage their understanding of the world learned from vast datasets to handle situations they have never explicitly encountered.
A striking demonstration of this capability involved a robot being asked to "pick up the basketball and slam dunk it." The robot had never seen the specific toy basketball in the scene, had never been trained on basketball-related tasks, and yet it successfully identified the object, grasped it, and performed the requested action—all in about 200 milliseconds. This level of generalization is what will ultimately enable robots to operate in the messy, unpredictable real world rather than just carefully controlled laboratory environments.
The Multi-Modal Intelligence Stack
The power of these systems comes from their ability to process and integrate multiple modalities of information simultaneously. They can understand natural language commands, perceive their environment through cameras and other sensors, reason about spatial relationships and physics, plan sequences of actions, and execute those actions through precise motor control. This multi-modal intelligence is what enables robots to perform complex tasks that require understanding context, adapting to unexpected situations, and coordinating multiple sub-tasks.
Several companies at the summit discussed their approaches to building these multi-modal systems. The common thread was the use of transformers as the core architecture, combined with training on diverse datasets that include not just robot demonstrations but also human videos, simulations, and even internet-scale image and text data. The ability to leverage this broad pre-training and then fine-tune on robot-specific data is what makes these models so powerful.
Dexterity and Manipulation: The Next Frontier
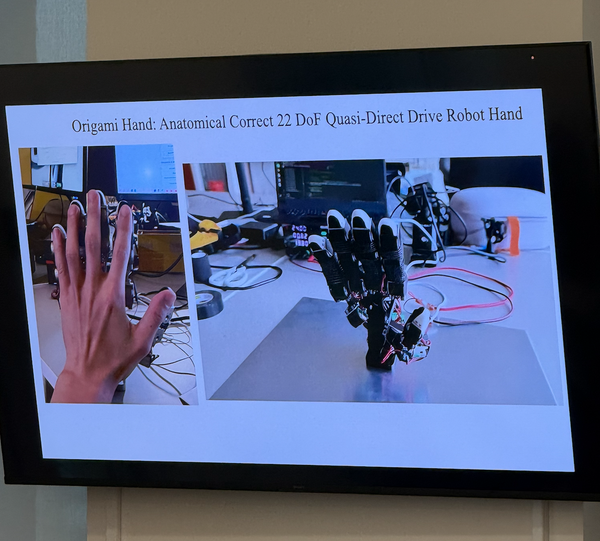
While mobility and high-level reasoning have seen tremendous progress, dexterity remains one of the most challenging problems in humanoid robotics. The summit featured extensive discussions on what was repeatedly referred to as "the hands problem." Human hands are extraordinarily complex instruments, with 27 bones, numerous muscles and tendons, and a rich sense of touch. Replicating even a fraction of this capability in a robotic system is extremely difficult.
The discussions revealed a diversity of approaches to this problem. Some companies are developing highly articulated, multi-fingered hands with advanced tactile sensors, aiming to replicate human-like dexterity. Others are taking a more pragmatic approach, using simpler grippers that may not be as versatile but are more robust and easier to control. There was a consensus that significant advances in end-effector technology are needed to unlock the full potential of humanoid robots, particularly for tasks that require fine manipulation like assembly, food preparation, or handling delicate objects.
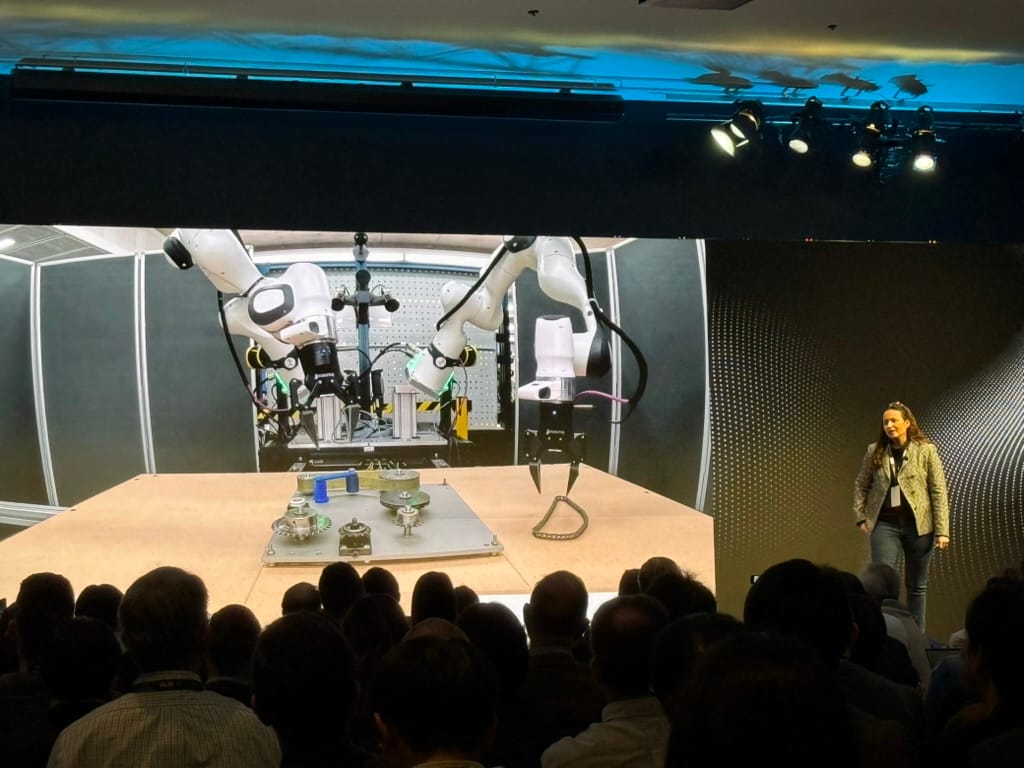
Google DeepMind demonstrated several examples of dexterous manipulation using their foundation models, including tasks that required bimanual coordination, tool use, and delicate handling of objects. The key insight was that while better hardware is certainly needed, the intelligence layer provided by foundation models can help robots make better use of whatever end-effectors they have. By understanding the physical properties of objects and the requirements of tasks, these models can plan grasps and manipulations that are more likely to succeed.
Safety and Robustness: Building Trustworthy Systems
A critical aspect of deploying foundation models in physical robots is ensuring they operate safely and reliably. The summit featured detailed discussions on the multi-layered approach to safety that leading companies are taking. This includes not just physical safety mechanisms like force limits and collision detection, but also "semantic safety"—the ability of the AI system to reason about what actions are safe in a given context.
Google DeepMind introduced several innovations in this area, including Constitutional AI for robotics, which allows developers to define behavioral rules or "constitutions" that the robot must follow. For example, a robot might be instructed never to place heavy objects on top of fragile ones, or to always check that a path is clear before moving. The system also demonstrated "interactive safety," where the robot can understand when a human is trying to intervene or take over control and respond appropriately.
To evaluate safety at scale, the company has developed automated testing frameworks that can generate thousands of scenarios and evaluate how the robot responds. This includes the Asimov Tool Benchmark, an open-source framework for evaluating safety and ethical behavior in robotics. The use of world models and multi-video generation allows the team to test robot policies in simulation before deploying them in the real world, significantly reducing the risk of failures or unsafe behaviors.
Part II: The Path to Commercial Deployment
From Lab Demos to Real-World Value
While the technical capabilities demonstrated at the summit were impressive, the most pressing question for many attendees was: when will these robots actually be deployed at scale, and what will they do? Several companies provided detailed insights into their commercialization strategies and the lessons they have learned from early deployments.

Agility Robotics: Pioneering Humanoid Deployment in Logistics
Agility Robotics has emerged as one of the leaders in commercial humanoid deployment, with robots already operating in real-world logistics and manufacturing environments. The company is now on its fourth generation of humanoid robots, and its deployment at GXO Logistics has been particularly noteworthy. Over the course of more than a year, Agility's robots have handled over 100,000 totes, working alongside autonomous mobile robots (AMRs) in a dynamic warehouse environment.
The key to this success has been a focus on configurability and reliability. Rather than requiring extensive custom programming for each new task, Agility's robots use learning from demonstration (LfD) approaches. A human operator can teleoperate the robot for a few hours to demonstrate a new skill, and this data can then be used to train the robot to perform that skill autonomously. This dramatically reduces the time and cost of deployment compared to traditional programming approaches.
The company has also had to grapple with the realities of operating complex electromechanical systems in demanding environments. One particularly instructive example involved a failure caused by a stress fracture in a printed circuit board that occurred after approximately 1,000 steps. This kind of hardware failure, which might not be caught in initial testing, highlights the importance of comprehensive functional safety approaches that consider not just nominal operation but also fault conditions and long-term wear.
The Hybrid Autonomy Model: Combining AI and Human Intelligence
A recurring theme in the commercialization discussions was the value of hybrid autonomy—combining autonomous capabilities with human-in-the-loop teleoperation. This approach recognizes that while foundation models are powerful, they are not yet perfect, and there will be situations where human judgment is needed.
One company discussed its approach to deploying humanoid robots for laundry folding in commercial laundromats. The robots are designed to operate autonomously for the majority of tasks, but when they encounter a garment type they haven't seen before or a particularly challenging folding scenario, they can seamlessly hand off control to a remote human operator. This not only ensures that the task gets completed successfully but also provides valuable training data that can be used to improve the robot's autonomous capabilities over time.
This hybrid model has several advantages. It allows companies to deploy robots in real-world settings even before they have achieved perfect autonomy. It provides a path to continuous improvement, as each human intervention generates data that can be used for training. And it opens up interesting business models, such as using remote labor from lower-cost regions to provide teleoperation services, creating what one speaker described as an "Airbnb for robot labor."
Manufacturing and Industrial Applications
While much of the public attention on humanoid robots has focused on consumer applications, the near-term commercial opportunities are primarily in industrial settings. The summit featured several examples of humanoids being deployed in manufacturing environments for tasks like depalletizing, machine tending, and parts handling.
The value proposition in these settings is clear: humanoid robots can work in spaces designed for humans without requiring extensive modifications to the environment. They can handle a variety of tasks with the same hardware platform, providing flexibility that traditional industrial robots lack. And they can work continuously without breaks, in conditions that might be uncomfortable or dangerous for human workers.
One particularly compelling use case involved robots working in constrained spaces around conveyor systems, stacking empty totes in areas where there simply wasn't room for a traditional industrial robot or even a human worker to operate comfortably. The humanoid form factor, with its ability to reach, bend, and navigate tight spaces, provided a unique solution to this problem.
The Economics of Humanoid Deployment
Several speakers addressed the economic considerations of humanoid deployment. The upfront cost of a humanoid robot is still significant, but the total cost of ownership calculation needs to consider not just the hardware but also the cost of deployment, maintenance, and operation. For tasks where a humanoid can replace multiple specialized systems or where it can operate in environments that would require expensive modifications for traditional automation, the economics can be quite favorable.
The discussion also touched on the importance of vertical integration for some companies. By controlling the entire stack from hardware design to software to deployment, companies can iterate more quickly and optimize the system as a whole rather than trying to integrate components from multiple suppliers. However, this approach also requires significant capital and expertise, and not all companies will choose this path.
Part III: The China Factor and Global Competition
China's Rapid Ascent in Humanoid Robotics
One of the most striking panels at the summit focused on China's emergence as a major force in humanoid robotics. The scale and speed of China's progress in this field has surprised many observers. According to data presented at the summit, China has at least 50 humanoid robots in development or deployment, compared to significantly fewer in the United States and Europe.

This rapid progress is being driven by several factors. The Chinese government has made robotics a national priority, providing substantial funding and policy support. There is a large and growing ecosystem of robotics companies, component suppliers, and research institutions. And Chinese companies are able to iterate and manufacture at scale more quickly than many of their Western counterparts, thanks to the country's advanced manufacturing infrastructure.
Several Chinese companies presented at the summit, showcasing impressive capabilities. XPeng's IRON humanoid, for example, was described as "the most human-like catwalk humanoid," with advanced mobility and a focus on natural, human-like movement. Booster Robotics discussed its efforts to build a developer ecosystem and drive productivity through open platforms. Robot Era shared insights on how it is optimizing humanoids for performance in the Chinese market, with a focus on rapid iteration and practical deployment.

Collaboration vs. Competition
The discussion of China's role in humanoid robotics raised important questions about the balance between collaboration and competition. On one hand, the global nature of scientific research and the shared challenges facing the field suggest that collaboration could accelerate progress for everyone. Many of the fundamental technologies, such as foundation models and simulation tools, are being developed in an open manner that benefits the entire community.
On the other hand, there are legitimate concerns about national security, intellectual property, and maintaining competitive advantage. The panel discussion on this topic featured perspectives from industry leaders, policymakers, and investors, and while there was no consensus on the right approach, there was agreement that the United States needs to be strategic in how it engages with China on robotics.
The Global Ecosystem
Beyond China, the summit highlighted the global nature of the humanoid robotics ecosystem. Japan, with its long history in robotics, continues to be a major player, with organizations like AIRoA Japan working to build the foundation for next-generation robotics and AI technologies. European companies and research institutions are making significant contributions, particularly in areas like safety standards and functional safety. And countries like South Korea, Singapore, and India are all investing heavily in robotics research and development.
This global ecosystem is both a challenge and an opportunity for companies and investors. It means that competition is fierce and that no single country or region can afford to be complacent. But it also means that there are opportunities for collaboration, for learning from the best practices developed in different parts of the world, and for building truly global companies that can leverage talent and resources from anywhere.
Part IV: Policy, Regulation, and the Path Forward
The Urgent Need for a National Robotics Strategy
One of the most passionate discussions at the summit centered on the need for proactive government engagement with the robotics industry. The presentation from Boston Dynamics on this topic laid out a compelling case for why now is the time for the United States to develop a comprehensive national robotics strategy.

The argument rests on several key observations. First, robots are no longer confined to factories; they are increasingly operating in public spaces, interacting with people, and taking on roles that have significant societal implications. Second, the convergence of AI and robotics is creating new capabilities and new risks that existing regulatory frameworks were not designed to address. Third, other countries, including China, Japan, and South Korea, have already developed national robotics strategies, and the United States risks falling behind if it does not act.
A national robotics strategy would serve several purposes. It would help coordinate research and development efforts across government, industry, and academia. It would provide a framework for addressing policy issues like safety standards, liability, and workforce impacts. It would signal to the private sector that the government is committed to supporting the growth of the robotics industry. And it would help ensure that the United States remains a global leader in this critical technology.

Recent Policy Developments
The summit provided an update on recent policy developments related to robotics. The National Robotics Caucus in Congress has been relaunched with new leadership, signaling increased attention to robotics issues on Capitol Hill. The Department of Commerce has initiated a Section 232 investigation into potential tariffs on imported robotics and industrial machinery, marking one of the first times a government agency has focused explicitly on robotics policy.
Perhaps most significantly, the National Defense Authorization Act (NDAA) included provisions related to unmanned ground systems, with specific mentions of humanoid robots. While these provisions are focused on national security applications, they represent an important step in bringing robotics into the policy conversation at the federal level.
There have also been discussions about the possibility of an executive order to support the robotics industry, similar to recent executive orders on artificial intelligence. While no such order has been announced, the fact that it is being discussed in policy circles is an indication of the growing recognition of robotics as a strategically important technology.
Safety Standards and Industry Self-Regulation
Safety is a critical concern as humanoid robots become more capable and begin to operate in closer proximity to people. The robotics industry has a long history of self-regulation through industry standards, and this tradition is continuing with the development of new standards specifically for humanoid robots and other advanced mobile robots.
One of the key efforts in this area is the ISO 25785 working group, which is developing safety standards for industrial mobile robots with active stability control. This includes humanoid robots, which use dynamic balance rather than static stability. Companies like Agility Robotics and Boston Dynamics are actively participating in this standards development process, bringing their real-world experience to bear on the creation of practical, effective safety guidelines.
The discussions at the summit emphasized that safety is not just about preventing physical harm; it also includes ensuring that AI systems behave in predictable and appropriate ways. This is where concepts like Constitutional AI and semantic safety come into play, allowing developers to define behavioral constraints that the robot must follow.
Workforce and Societal Implications
The summit also touched on the broader societal implications of humanoid robots, particularly the impact on the workforce. This is a sensitive topic, as there are legitimate concerns about job displacement. However, the discussions at the summit emphasized a more nuanced view.
In many industries, particularly manufacturing, there is a shortage of workers willing to do physically demanding, repetitive, or dangerous jobs. In these cases, humanoid robots are not displacing human workers but rather filling roles that would otherwise go unfilled. The demographic trends in many developed countries, with aging populations and declining birth rates, suggest that this labor shortage will only become more acute in the coming years.
At the same time, the introduction of humanoid robots will create new types of jobs—designing, programming, maintaining, and supervising these systems. The challenge for policymakers and industry will be to ensure that workers have the skills and training needed to transition to these new roles.
Part V: The Investment Landscape
The Humanoid Investment Thesis
The summit featured a panel specifically focused on the investment perspective on humanoid robotics. The discussion revealed both tremendous optimism about the long-term potential of the technology and a clear-eyed assessment of the challenges and risks.

The bull case for humanoid robotics is compelling. The total addressable market is enormous—essentially any task that involves physical labor could potentially be automated with sufficiently capable humanoid robots. The technology is advancing rapidly, with foundation models providing a clear path to general-purpose capabilities. And there is growing evidence from early deployments that these robots can provide real economic value today, not just in some distant future.
However, investors also need to be aware of the significant challenges. Humanoid robotics is a capital-intensive business, requiring substantial investment in both hardware development and AI research. The path to profitability is long, and there will inevitably be setbacks and failures along the way. The competitive landscape is crowded, with numerous well-funded startups and deep-pocketed tech giants all vying for market share.
What Investors Should Look For
The panelists offered several pieces of advice for investors evaluating humanoid robotics companies. First and foremost, the quality of the team is critical. Building a successful humanoid robotics company requires expertise spanning mechanical engineering, electrical engineering, AI, software, and business strategy. Look for teams that have a track record of execution and a deep understanding of the technical challenges.
Second, evaluate the company's approach to the technology. Is it building on proven foundations, or is it trying to reinvent the wheel? Does it have a clear path to achieving the performance and reliability needed for commercial deployment? Is it focused on solving real problems that customers will pay for, or is it chasing science fiction visions that may not be achievable in the near term?
Third, consider the go-to-market strategy. The companies that will succeed in the near term are those that have identified specific, high-value use cases and have a plan for getting their robots deployed in those applications. Look for companies that have early customers, pilot programs, or other evidence of market validation.
Finally, think about the company's position in the ecosystem. Is it vertically integrated, controlling the entire stack, or is it focused on a specific component or layer? Both approaches can work, but they have different risk profiles and capital requirements.
The Role of Corporate Venture Capital
The summit highlighted the growing role of corporate venture capital in the humanoid robotics space. Companies like Hyundai Mobis Ventures, Micron Ventures, and others are making strategic investments in robotics startups. These corporate investors bring not just capital but also domain expertise, potential customers, and access to supply chains and manufacturing capabilities.
For startups, partnering with a strategic corporate investor can provide significant advantages, but it also comes with potential risks. It's important to ensure that the partnership is structured in a way that preserves the startup's independence and doesn't create conflicts with other potential customers or partners.
Part VI: Technical Deep Dives
Simulation and Synthetic Data
One of the enabling technologies for the rapid progress in humanoid robotics is the use of simulation and synthetic data for training. Several companies at the summit discussed their approaches to simulation, and a common theme emerged: simulation is not just a nice-to-have tool for testing; it is an essential component of the development pipeline.
The reason is simple: it is not feasible to generate the vast amounts of training data needed for foundation models purely through real-world robot operation. Robots are slow, expensive, and prone to failures, especially when they are learning new tasks. Simulation allows companies to generate thousands or even millions of training examples quickly and cheaply, exploring a much wider range of scenarios than would be possible in the real world.
However, simulation is only useful if the learned behaviors transfer effectively to the real world—the so-called "sim-to-real" problem. The summit featured discussions of various techniques for improving sim-to-real transfer, including domain randomization (varying the parameters of the simulation to make the learned policies more robust), using high-fidelity physics engines, and incorporating real-world data into the simulation.
One particularly interesting approach discussed was the use of world models—AI systems that can predict the future state of the environment given the current state and a proposed action. These world models can be trained on real-world data and then used to generate synthetic training data that is more realistic than traditional simulation. They can also be used for planning, allowing the robot to mentally simulate different courses of action before committing to one.
The Software Stack
Building a humanoid robot requires not just hardware and AI models but also a sophisticated software stack that ties everything together. Several companies at the summit discussed their approaches to this challenge, and it's clear that there is no one-size-fits-all solution.
At the lowest level, there is the real-time control system that translates high-level commands into motor commands and processes sensor data. This needs to run at high frequency (typically 100 Hz or more) and with low latency to ensure stable, responsive control. Above this is the perception and planning layer, which processes sensor data to build a model of the environment and plans actions to achieve goals. This is where the foundation models typically operate, running at lower frequency (1-10 Hz) but with much more computational complexity.
Above the planning layer is the task execution layer, which manages the execution of complex, multi-step tasks, handles exceptions, and coordinates between different subsystems. And at the top is the user interface layer, which allows human operators to interact with the robot, whether through natural language commands, teleoperation interfaces, or high-level task specifications.
One of the challenges in building this software stack is managing the trade-offs between different requirements. Real-time control requires low latency and deterministic behavior, while AI models benefit from large batch sizes and can tolerate some latency. Perception needs to be robust to sensor noise and environmental variability, while planning needs to be fast enough to react to dynamic situations. Balancing these requirements and building a system that is both capable and reliable is a significant engineering challenge.
Hardware Innovations
While much of the attention at the summit was on AI and software, there were also important discussions about hardware innovations. The mechanical design of humanoid robots has evolved significantly in recent years, with a focus on improving power density, reducing weight, and increasing robustness.

One area of particular focus is actuators—the motors and gears that drive the robot's joints. Traditional industrial robot actuators are heavy and power-hungry, making them unsuitable for mobile humanoid robots. The latest generation of actuators uses advanced materials, innovative gear designs, and integrated electronics to achieve much better power-to-weight ratios. Some companies are even developing custom actuators specifically optimized for humanoid applications.

Another area of innovation is in sensors. Humanoid robots need a rich sensory suite to perceive their environment and their own state. This includes cameras for vision, force/torque sensors for measuring interaction forces, inertial measurement units (IMUs) for balance and orientation, and tactile sensors for touch. The challenge is integrating all of these sensors into a compact, robust package and processing the resulting data streams in real time.

Battery technology is another critical area. Humanoid robots are power-hungry, and the battery needs to be light enough not to compromise mobility while providing enough capacity for useful operation times. Several companies at the summit discussed their approaches to power management, including the use of advanced lithium-ion batteries, supercapacitors for peak power demands, and intelligent power management systems that optimize energy use.
Part VII: Vertical Applications and Use Cases
Healthcare and Hospitals
One of the most promising application areas for humanoid robots is healthcare. Several companies at the summit discussed their efforts to develop robots specifically for hospital environments. The use cases are diverse: transporting medications and supplies, assisting with patient mobility, performing routine cleaning and disinfection, and even providing companionship for elderly patients.
The healthcare environment presents unique challenges for robotics. Hospitals are busy, dynamic spaces with many people moving around. They require high standards of cleanliness and infection control. And there are strict regulations around medical devices and patient safety. However, the potential benefits are also significant. Healthcare workers are often overworked and understaffed, and there are many tasks that could be automated to free up their time for higher-value activities.
One company presented its vision for a "physical AI layer for hospitals," where humanoid robots would integrate with hospital information systems to autonomously perform a variety of tasks. For example, a robot could receive a request to deliver medication to a patient, navigate to the pharmacy, pick up the medication, navigate to the patient's room, and deliver it—all without human intervention. The robot would need to navigate crowded hallways, operate elevators, open doors, and interact safely with staff and patients.
Eldercare and Assistance
Related to healthcare is the application of humanoid robots for eldercare and assistance. With aging populations in many developed countries, there is a growing need for solutions that can help elderly people maintain their independence and quality of life. Humanoid robots could assist with daily activities like meal preparation, housekeeping, and mobility, while also providing companionship and monitoring for health issues.
One presentation discussed a humanoid designed specifically as a "cognitive companion" for elderly people, with a focus on emotional intelligence and natural interaction. The robot uses advanced natural language processing to engage in conversations, can recognize and respond to emotional cues, and can learn individual preferences and routines over time. The goal is not to replace human caregivers but to supplement them, providing assistance and companionship when human caregivers are not available.
Retail and Hospitality
Several companies discussed applications of humanoid robots in retail and hospitality settings. In retail, robots could assist with inventory management, restocking shelves, and helping customers find products. In hospitality, they could serve as concierges, deliver room service, or perform housekeeping tasks.
These applications are attractive because they involve relatively structured environments and well-defined tasks, making them more tractable for current technology. They also have clear economic value propositions, as labor costs in these industries are significant. However, they also require robots that can interact naturally with customers, which places high demands on the user interface and social intelligence of the system.
Extreme Environments
An interesting category of applications discussed at the summit involves deploying humanoid robots in extreme or hazardous environments where it is dangerous or impossible for humans to work. This includes nuclear facilities, where robots can perform inspections and maintenance in areas with high radiation levels; disaster response scenarios, where robots can search for survivors or assess damage; and even space exploration, where humanoid robots could assist astronauts or perform tasks on planetary surfaces.
These applications often require robots with exceptional robustness and reliability, as they may need to operate for extended periods without maintenance or in conditions that would quickly degrade conventional systems. They also often require teleoperation capabilities, as the environments are too unpredictable for fully autonomous operation. However, the value proposition is clear: these are tasks that simply cannot be done by humans, so even relatively expensive and complex robotic systems can be justified.
Part VIII: The Startup Ecosystem
Fire Pitches: Innovation from Emerging Companies
One of the highlights of the summit was a session featuring rapid-fire pitches from early-stage startups. These presentations provided a glimpse into the breadth of innovation happening in the humanoid robotics ecosystem and the variety of approaches being taken to solve different aspects of the challenge.
One startup presented a bi-manual robotic arm system designed for compact, portable deployment—literally "a robot in a box." The focus was on making advanced manipulation capabilities accessible to small and medium-sized businesses that might not have the space or resources for traditional industrial robots.
Another company discussed ultra-fast charging energy storage systems specifically designed for untethered robotics applications. Battery life and charging time are significant constraints for mobile robots, and innovations in this area could have a major impact on the practicality of humanoid deployment.
A startup focused on teleoperation presented its vision for accelerating robotics deployment by making it easy for robots to be remotely operated when autonomous capabilities are insufficient. The system uses advanced VR interfaces and haptic feedback to give operators a sense of presence and control, enabling them to perform complex manipulation tasks remotely.
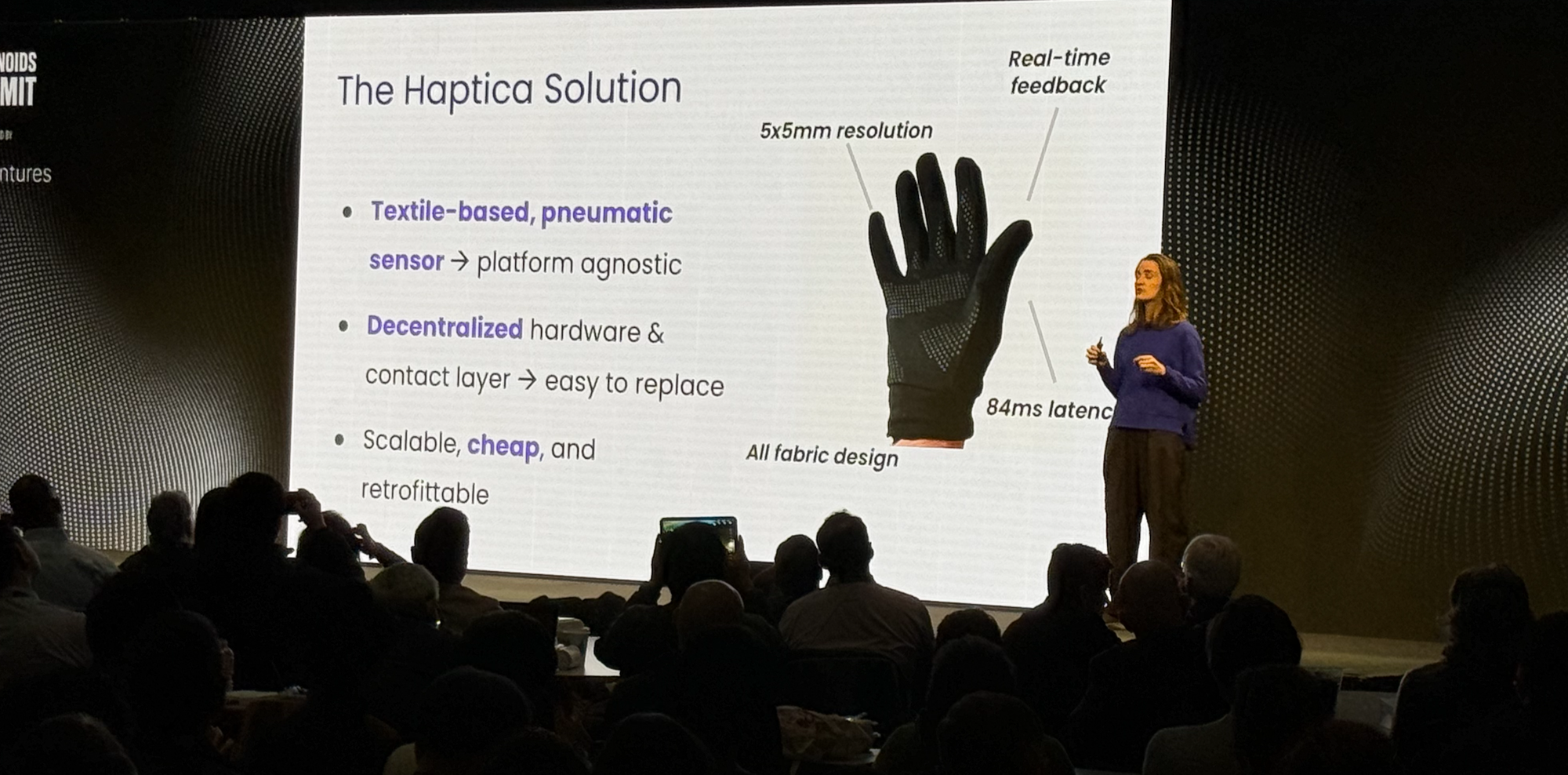
One particularly interesting pitch came from a company developing tactile sensing technology to give robots a sense of touch. The ability to feel the texture, temperature, and compliance of objects is critical for many manipulation tasks, and current robots are largely "numb" compared to humans. This startup's technology uses advanced sensor arrays and machine learning to provide robots with rich tactile information.
Another startup discussed its work on world models and simulation for robotics. The company's vision is to enable robots to "dream"—to mentally simulate different scenarios and learn from those simulations without needing to physically execute actions. This could dramatically accelerate learning and reduce the amount of real-world data needed for training.
The Challenges of Building a Robotics Startup
Several panels and discussions touched on the unique challenges of building a robotics startup. Unlike pure software companies, robotics startups need to deal with the complexities of hardware development, manufacturing, supply chains, and physical testing. This makes them more capital-intensive and slower to iterate than typical tech startups.
One recurring theme was the importance of focus. Given the breadth of challenges in humanoid robotics, it's tempting for startups to try to solve everything at once. However, the most successful companies are those that identify a specific, high-value problem and focus relentlessly on solving it. This might mean focusing on a particular application vertical, a specific component of the technology stack, or a particular customer segment.
Another theme was the importance of partnerships. No single company can build a complete humanoid robot system from scratch. Successful startups are those that can identify what they need to build in-house and what they can source from partners, and that can build relationships with suppliers, customers, and other stakeholders in the ecosystem.
Part IX: The Human Element
Human-Robot Interaction and User Experience
As humanoid robots move from laboratories into real-world settings, the quality of human-robot interaction becomes increasingly important. Several presentations at the summit focused on the user experience aspects of humanoid robotics, exploring how to make these systems intuitive, trustworthy, and pleasant to work with.
One key insight is that humanoid robots benefit from the fact that humans naturally anthropomorphize them. We instinctively treat human-shaped robots as if they were social agents, which can make interaction more natural. However, this also creates expectations that can be difficult to meet. If a robot looks human-like but behaves in unexpected or unnatural ways, it can create a sense of unease or frustration.
The discussions highlighted several principles for good human-robot interaction design. First, the robot should communicate its intentions clearly, so that people around it can predict what it will do. This might be through visual cues like LED indicators, audio cues like beeps or speech, or through natural body language like looking in the direction it intends to move.
Second, the robot should be responsive to human input. If a person tries to get the robot's attention or asks it to stop, it should respond quickly and appropriately. This requires not just good sensors and perception systems but also social intelligence—the ability to recognize and interpret human social cues.
Third, the robot should be forgiving of human error. In a shared workspace, people will inevitably do things that the robot doesn't expect. The robot needs to be able to handle these situations gracefully, rather than failing catastrophically or behaving unpredictably.
Trust and Co-Adaptation
A fascinating panel discussion explored the concept of trust in human-robot collaboration and how humans and robots can co-adapt to work together effectively. Trust is not something that can be programmed into a robot; it emerges from repeated interactions where the robot behaves reliably and predictably.
The panelists discussed the idea that trust is built through transparency and consistency. If a robot can explain what it's doing and why, and if it behaves consistently across similar situations, people are more likely to trust it. This has implications for the design of AI systems—there is value in systems that can provide explanations for their decisions, even if those explanations are simplified versions of the complex reasoning actually happening inside the model.
The discussion also touched on the concept of co-adaptation—the idea that both humans and robots need to adapt to work together effectively. Humans need to learn the capabilities and limitations of the robots they work with, and robots need to learn the preferences and working styles of their human collaborators. This mutual adaptation process takes time, and systems that can accelerate it through active learning and personalization will be more successful.
The Workforce Transition
Several speakers addressed the sensitive topic of how the introduction of humanoid robots will affect the workforce. The discussions acknowledged that there will be disruption, but emphasized that the nature of that disruption is not simply "robots taking jobs." Instead, the picture is more nuanced.
In many industries, there are tasks that are physically demanding, repetitive, or dangerous—tasks that many workers would prefer not to do. Automating these tasks with humanoid robots can improve working conditions and allow human workers to focus on more skilled, interesting, and valuable work. In industries facing labor shortages, robots can fill roles that would otherwise go unfilled, enabling businesses to grow rather than displacing existing workers.
However, this transition will not happen automatically. There is a need for workforce training and reskilling programs to help workers transition to new roles working alongside robots. There is also a need for thoughtful policy to ensure that the benefits of automation are broadly shared rather than accruing only to capital owners.
Part X: Looking Forward
The Timeline to General-Purpose Humanoids
One of the questions that came up repeatedly at the summit was: when will we have truly general-purpose humanoid robots that can perform any task a human can? The consensus was that this is still a long-term goal, likely decades away. However, the path to that goal is becoming clearer, and there are many valuable milestones along the way.
In the near term (1-3 years), we can expect to see continued deployment of humanoid robots in structured environments like warehouses and factories, performing specific tasks that have been well-defined and trained. These robots will become more reliable, more capable, and more cost-effective, expanding the range of economically viable applications.
In the medium term (3-7 years), foundation models and improved hardware will enable robots to handle a broader range of tasks with less task-specific training. We may see robots that can be deployed in new environments and quickly learn new skills through demonstration or natural language instruction. This is when humanoid robots could start to move beyond industrial settings into commercial and eventually residential applications.
In the long term (7+ years), continued advances in AI, hardware, and our understanding of embodied intelligence could lead to robots that truly rival human capabilities in terms of versatility, dexterity, and adaptability. These robots would be able to operate in any environment, learn new tasks quickly, and collaborate seamlessly with humans.
Key Technical Challenges Ahead
Despite the tremendous progress, significant technical challenges remain. The summit discussions highlighted several areas where breakthroughs are needed:
Dexterity and Manipulation: Current robots are still far from human-level dexterity. Advances in end-effector design, tactile sensing, and manipulation planning are needed to enable robots to handle a wider range of objects and perform more complex manipulation tasks.
Energy Efficiency: Humanoid robots are power-hungry, and battery technology is a limiting factor for mobile operation. Improvements in actuator efficiency, power management, and battery technology are needed to extend operation times and reduce the frequency of charging.
Robustness and Reliability: For robots to be deployed at scale, they need to be extremely reliable, operating for thousands of hours without failures. This requires advances in both hardware durability and software fault tolerance.
Common Sense Reasoning: While foundation models have made great strides, robots still lack the kind of deep common sense understanding that humans have. Enabling robots to reason about causality, physics, and social norms in a more human-like way is an ongoing challenge.
Sim-to-Real Transfer: While simulation is a powerful tool, there is still a gap between simulated and real-world performance. Better simulation techniques and better methods for transferring learned behaviors to the real world are needed.
The Ecosystem Continues to Evolve
The humanoid robotics ecosystem is dynamic and rapidly evolving. New companies are being founded, established players are making strategic pivots, and the boundaries between different parts of the value chain are shifting. Some trends that emerged from the summit discussions:
Vertical Integration vs. Specialization: There is an ongoing debate about whether successful humanoid robotics companies need to be vertically integrated, controlling everything from hardware to AI to applications, or whether a more modular ecosystem with specialized players will emerge. The answer may be "both"—different approaches may work for different market segments.
Open Source vs. Proprietary: There is a tension between the benefits of open-source development, which can accelerate innovation and create network effects, and the need for companies to maintain competitive advantages through proprietary technology. We are likely to see a mix, with some foundational technologies being open while companies differentiate on integration, performance, and application-specific capabilities.
Hardware Commoditization: As the technology matures, there may be opportunities for standardization and commoditization of certain hardware components, similar to what happened in the PC industry. This could lower barriers to entry and accelerate innovation, but it could also compress margins for hardware manufacturers.
The Role of Policy and Regulation
The discussions at the summit made clear that the future of humanoid robotics will be shaped not just by technology but also by policy and regulation. There is a critical need for policymakers to engage with the industry to develop frameworks that promote innovation while ensuring safety and addressing societal concerns.
Key policy areas that need attention include:
Safety Standards: Developing comprehensive safety standards for humanoid robots that address both physical safety and AI system safety.
Liability and Insurance: Clarifying questions of liability when robots cause harm or damage, and developing insurance frameworks for robot deployment.
Data and Privacy: Establishing rules for how robots can collect, use, and share data, particularly in settings like homes and healthcare facilities where privacy is paramount.
Workforce Policy: Developing programs to help workers transition to new roles as automation increases, and ensuring that the benefits of automation are broadly shared.
International Coordination: Working with other countries to develop harmonized standards and regulations, while also addressing issues of technology transfer and national security.
Conclusion: The Humanoid Moment
The 2025 Humanoids Summit captured a field at an inflection point. After decades of research and development, humanoid robots are finally transitioning from research laboratories to real-world deployment. The convergence of foundation models, advanced hardware, and growing market demand is creating a perfect storm of opportunity.
For investors, this represents one of the most significant technology opportunities of the coming decade. The total addressable market for humanoid robotics is measured in trillions of dollars, and we are still in the very early stages of what will be a multi-decade transformation. However, success will require patience, as the path to profitability is long and the technical challenges are significant.
For entrepreneurs, the message is clear: there is room for many winners in this space. Whether you are building complete humanoid systems, developing specialized components, creating enabling software, or focusing on specific application verticals, there are opportunities to create significant value. The key is to focus on solving real problems, to build great teams, and to be prepared for a long journey.
For society, the rise of humanoid robots presents both opportunities and challenges. These machines have the potential to address labor shortages, improve productivity, and free humans from dangerous and unpleasant work. But they also raise questions about employment, privacy, and the nature of human work. Navigating these challenges will require thoughtful policy, open dialogue, and a commitment to ensuring that the benefits of this technology are broadly shared.
The Humanoids Summit brought together a remarkable community of researchers, entrepreneurs, investors, and policymakers, all united by a shared vision of a future where humans and humanoid robots work together to solve some of humanity's greatest challenges. The energy and optimism at the event were palpable, tempered by a realistic understanding of the work that remains to be done.
As we stand at the dawn of the humanoid era, the path forward is becoming clearer. The technology is advancing rapidly, the commercial opportunities are emerging, and the ecosystem is maturing. The coming years will be critical in determining which companies, which technologies, and which approaches will ultimately succeed. But one thing is certain: humanoid robots are no longer science fiction. They are here, they are real, and they are going to change the world.
Acknowledgments
This report would not have been possible without the generous sharing of knowledge and insights by all the speakers, panelists, and participants at the 2025 Humanoids Summit.
Keynote Speakers and Presenters: Carolina Parada (Google DeepMind), Moritz Baecher (Disney Research), Nic Radford (Persona AI), Kamel Saidi (NIST), Brendan Schulman (Boston Dynamics), Abhinav Gupta (Skild AI), Pete Florence (Generalist), Allen Ren (Physical Intelligence), James Wells (Sanctuary AI), Pras Velagapudi (Agility Robotics), Jian Yao (XPeng), He Wang (Galbot), Ali Agha (FieldAI), Jason Ma (Dyna Robotics), Kaan Dogrusoz and Evan Wineland (Weave Robotics), Jochen Rudat (Humanoid), David Zhang (High Torque Robotics), Christian Souche (Accenture), Aadeel Akhtar (Psyonic), Frederik Ebert (Emancro), Chaoyi Li (Booster Robotics), Tetsuya Ogata (AIRoA Japan), Florian Weisshardt (Synapticon), Letian Wang (Robot Era), Lorenzo Juncaj (Borg Robotics), Rob Cochran (Fauna Robotics), Steve Xie (Lightwheel)
Startup Fire Pitch Presenters: Stian Jakobsen and Simon Gormuzov (O-ID), Igor Kulakov (MicroFactory), Michael Sinkula (Morelle), James Naylor (Adamo), Cosima du Pasquier (Haptica Robotics), Anto Patrex (CosmicBrain AI)
Panel Moderators: Gerrit de Vynck (The Washington Post), Rafe Rosner-Uddin (Financial Times), Rocket Drew (The Information), Jeremy Fishel (Sanctuary AI), Bogdan Cristei (SHACK15 Ventures), Yifan Yu (Nikkei Asia), Tim Fernholz (Tech Reporter), Anna Tong (Forbes)
Panelists: Ani Kelkar and Mikael Robertson (McKinsey & Company), Ramkumar Devarajulu (Cambridge Consultants), Jeff Pittelkow (Roboworx), Joe Michaels (1HMX), Marya Unwala (ALM Ventures), Jennifer Roberts (Grit Ventures), Mitchell Yun (Hyundai Mobis Ventures), Henry Huang (Micron Ventures), Udaya Rongala (IntuiCell), Behrad Toghi (General Motors), Ashutosh Saxena (TorqueAGI), Edward Colgate (HAND Engineering Research Center), Jeff Burnstein (A3), Kimate Richards (AWS), Donny Li (RealMan Robotics), Matt Willis (Agility Robotics), Ryan Saavedra (Alt-Bionics), Chris Kudla (Mind Children), Pip Mothersill (MERPHI), Elliot Helms (Novanta), Dr. Dominik Boemer (FEV Consulting), Max Goncharov (RemBrain)
Breakout Session Speakers: Niv Sundaram (Machani Robotics), Werner Kraus (Fraunhofer), Prasanna Mantravadi (FEV Consulting), Roy Zorba (Human X), Sumanth Nirmal (APEX.AI)
Event Leadership: Modar Alaoui (ALM Ventures & Humanoids Summit Founder), Nick Tucker (Event MC)
Special thanks to the Computer History Museum for hosting this landmark event and to all the exhibitors, sponsors, and attendees who contributed to making the summit a success.
Written by Bogdan Cristei and Manus AI.