The Role of Teleoperation in the Race for Embodied Autonomy

Executive Summary: The development of general-purpose robots has converged on a critical, near-term strategy: leveraging human-operated teleoperation to generate the vast datasets required for training embodied AI foundation models. While effective, this approach has created a strategic schism in the market. This briefing provides a framework for analyzing the divergent strategies, evaluates the core trade-offs, and offers key considerations for builders and investors navigating this complex landscape. The central thesis is that long-term success will not be determined by the ability to perform teleoperation, but by the ability to develop a scalable, cost-effective strategy to escape its linear limitations.
A Framework for Analysis: The Data Strategy Matrix
To move beyond a simple list of market players, it is necessary to use a framework that captures the core strategic trade-offs. The Data Strategy Matrix is a tool for plotting company strategies along two critical axes: Data Fidelity (the richness and sensory depth of the collected data) and Data Scalability (the ease and speed of acquiring massive datasets).
This matrix reveals four distinct strategic postures:
- Artisans (High-Fidelity, Low-Scalability): These companies hypothesize that high-quality, multi-modal data (including haptics) is essential for unlocking complex manipulation. Their primary risk is a slow, expensive data acquisition process that may fail to achieve the scale required for robust generalization.
- Scalers (Low-Fidelity, High-Scalability): These companies prioritize data quantity, leveraging internet-scale video and simulation. Their primary risk is that their models may fail to grasp the physical nuances required for real-world interaction due to the embodiment gap and data noise.
- The Holy Grail (High-Fidelity, High-Scalability): This quadrant represents the ideal but technologically challenging goal of capturing rich data at an unprecedented scale. Success here would be transformative.
- The Danger Zone (Low-Fidelity, Low-Scalability): This represents an unsustainable strategic position with no clear path to either data quality or scale.
Here is a visual representation of where the key players sit on this matrix:

Analysis of Key Market Strategies
The Artisans: A Bet on Quality
In the top-left quadrant, we find the Artisans, who believe that data quality is paramount. Sanctuary AI is a prime example, with a strategy centered on high-fidelity haptic data as its primary competitive moat for fine-grained manipulation. For investors, the key question is whether the proprietary data from their Carbon™ platform is truly defensible and superior. For builders, the challenge is how to compete with this level of data fidelity at a lower cost. Similarly, Boston Dynamics leverages its unparalleled hardware to collect high-quality dynamic data for its Large Behavior Models (LBMs). The critical question for them is how to scale this data collection beyond a limited number of high-end platforms.
The Scalers: A Bet on Quantity
In the bottom-right, we have the Scalers, who prioritize data quantity. Figure AI has made a clear move into this quadrant with its "Project Go-Big," betting that the sheer volume of human video data will outweigh the need for perfectly-matched robot embodiment data. Investors must assess the technical risk of bridging this embodiment gap, while builders should consider whether a video-first approach is a viable shortcut or a dead end for complex tasks. 1X Technologies is also shifting aggressively into this quadrant with its new world model, representing a pragmatic acknowledgment of the limitations of pure teleoperation and a direct challenge to Figure's approach.
The Holy Grail: The Best of Both Worlds?
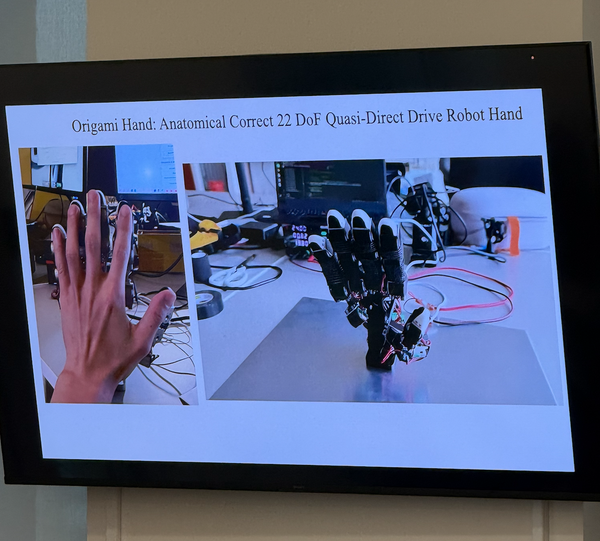
In the top-right, a few companies are aiming for the Holy Grail of high-fidelity data at high scale. Sunday Robotics is a key player to watch here. Their Skill Capture Glove is a direct attempt to capture high-fidelity skill data without the teleoperation bottleneck. For investors, this represents a potential disruption to the entire data collection paradigm. For builders, it raises the question of whether they should be developing their own novel data capture methods.
The Data Flywheel and the Scaling Dilemma
The core mechanic driving the current paradigm is the data flywheel: a virtuous cycle where human operators generate embodied data by controlling robots, which in turn is used to train more autonomous models. This process is effective for bootstrapping learning but presents a fundamental scaling challenge.

The primary limitation of the data flywheel is its linear scaling nature. A marginal increase in data generation requires a marginal increase in the number of robots and human operators, creating a capital- and labor-intensive process. This leads to a critical trade-off between the quality of the data and the scalability of the acquisition method.

As illustrated, data sources with the highest fidelity (e.g., pure teleoperation with haptics) are the least scalable. Conversely, the most scalable sources (e.g., internet video) have the lowest fidelity and present significant challenges in overcoming the embodiment gap. Understanding where a company operates on this spectrum is critical to evaluating its long-term viability.
Key Considerations for Investors and Builders
Given the current landscape, both investors performing due diligence and founders/engineers making strategic decisions should consider the following:
- The Embodiment Gap is a Technical, Not Just a Data, Problem. For investors, this means applying deep scrutiny to any strategy that relies solely on non-embodied data (e.g., video). Ask for concrete evidence of successful sim-to-real or human-to-robot transfer on complex, physical tasks. For builders, this suggests that investing in at least some level of high-quality, embodied data collection is a critical hedge against the limitations of scaled, low-fidelity data.
- Hybrid Data Strategies Offer a Pragmatic Path to Value. The most resilient companies in the near term will likely be those that blend data sources. For investors, look for teams that have a clear, tiered data strategy: teleoperation for bootstrapping and capturing edge cases, simulation for mass-scale exploration, and reinforcement learning for autonomous improvement. For builders, this means designing systems from the ground up to accommodate and learn from multiple data modalities, rather than betting on a single source.
- The Next Wave of Disruption Will Be in Data Acquisition Hardware. The linear scaling of teleoperation is the industry’s primary bottleneck. For investors, this highlights a significant opportunity in the enabling technologies that can break this paradigm. Companies developing novel sensors, haptic interfaces, or data capture methods (like Sunday Robotics) may represent a higher-leverage investment than the robot builders themselves. For builders, this is a call to innovate on the data capture process itself, as a breakthrough here could be a more significant competitive advantage than the robot’s physical design.
Conclusion:
The widespread use of teleoperation is a clear indicator of the immense challenge of creating embodied intelligence. It is a necessary tool for the current phase of the industry, but it is not the endgame. The central challenge for every company in this space is to build a data strategy that is not only effective for training today’s models but also provides a clear, scalable path to escape the linear, capital-intensive cycle of human-in-the-loop data collection. The long-term winners will be those who solve this scaling dilemma first.
References
[1] Sanctuary AI. (2024, January 24). AI Robotics and the Case for Teleoperation. https://www.sanctuary.ai/blog/ai-robotics-and-the-case-for-teleoperation
[2] Crowe, S. (2025, November 21). Teleop, not autonomy, is the path for 1X’s Neo humanoid. The Robot Report. https://www.therobotreport.com/teleop-not-autonomy-the-path-for-1x-neo-humanoid/
[3] Carter, T. (2026, January 16). An OpenAI-backed humanoid robot startup says it's moving away from using humans to train its Optimus rival. Business Insider. https://www.businessinsider.com/1x-humanoid-robot-training-humans-world-models-optimus-rival-2026-1
[4] Boston Dynamics. (2025, August 14). Large Behavior Models and Atlas Find New Footing. https://bostondynamics.com/blog/large-behavior-models-atlas-find-new-footing/
[5] Physical Intelligence. (2025, November 17). A VLA that Learns from Experience. https://www.pi.website/blog/pistar06
[6] Figure AI. (2025, September 18). Project Go-Big: Internet-Scale Humanoid Pretraining and Direct Human-to-Robot Transfer. https://www.figure.ai/news/project-go-big
[7] Reuters. (2025, March 18). Mercedes-Benz takes stake in robotics maker Apptronik, tests robots in factories. https://www.reuters.com/business/autos-transportation/mercedes-benz-takes-stake-robotics-maker-apptronik-tests-robots-factories-2025-03-18/
[8] Kay, G. (2025, August 25). Inside the Strategy Shift at Optimus, Tesla's Humanoid Robot Program. Business Insider. https://www.businessinsider.com/tesla-musk-optimus-humanoid-robot-training-motion-capture-cameras-2025-8
[9] Skild AI. (2026, January 12). Learning by watching human videos. https://www.skild.ai/blogs/learning-by-watching
[10] HaptX. (n.d.). Use Cases-Robotics. https://haptx.com/use-cases-robotics/
[11] Jang, J. (2026, February 6). World Models and the Data Problem in Robotics. https://joeljang.github.io/world-models-for-robotics
[12] Heater, B. (2025, December 10). Teleoperation is a Powerful Tool for Humanoid Robots, but Transparency is Key. Association for Advancing Automation. https://www.automate.org/robotics/industry-insights/teleoperation-is-a-powerful-tool-for-humanoid-robots-but-transparency-is-key
[13] Reflex Robotics. (n.d.). Reflex Robotics. https://www.reflexrobotics.com/
[14] Dyna Robotics. (n.d.). Dyna Robotics. https://www.dyna.co/
[15] Reddit. (2026, January 11). Toilet cleaning robot. https://www.reddit.com/r/robotics/comments/1q9y5wh/toilet_cleaning_robot/
[16] Unitree Robotics. (n.d.). xr_teleoperate. GitHub. https://github.com/unitreerobotics/xr_teleoperate
[17] Enchanted Tools. (n.d.). Enchanted Tools. https://enchanted.tools/
[18] TechCrunch. (2020, June 17). Freedom launches Pilot to simplify teleoperation on third-party robots. https://techcrunch.com/2020/06/17/freedom-launches-pilot-to-simplify-teleoperation-on-third-party-robots/
[19] Formant. (n.d.). Formant. https://formant.io/
[20] Sensei Robotics. (n.d.). Sensei Robotics. https://senseirobotics.com/
[21] Lightwheel AI. (n.d.). Lightwheel AI. https://www.lightwheel.ai/
[22] Shadow Robot. (n.d.). Teleoperation System. https://shadowrobot.com/teleoperation/
[23] Contact CI. (n.d.). Contact CI. https://contact.ci/
[24] Extend Robotics. (n.d.). Extend Robotics. https://www.extendrobotics.com/
[25] Mobile ALOHA. (n.d.). Mobile ALOHA. https://mobile-aloha.github.io/
[26] Sunday Robotics. (2025, November 19). ACT-1: A Robot Foundation Model Trained on Zero Robot Data. https://www.sunday.ai/journal/no-robot-data
[27] Agility Robotics. (2025, August 28). Training a Whole-Body Control Foundation Model. https://www.agilityrobotics.com/content/training-a-whole-body-control-foundation-model
[28] Covariant. (n.d.). Covariant. https://covariant.ai/
Written by Bogdan Cristei & Manus AI